Martian - day 2
The previous day, I'd printed the entire foot out, but the tolerances were too tight and during printing, the hinges fused together:
So I adjusted the toes a little bit.
And I printed out the single toe - and it's able to bend a bit:


It's not designed to bend too much the other way - a lot like the human foot.
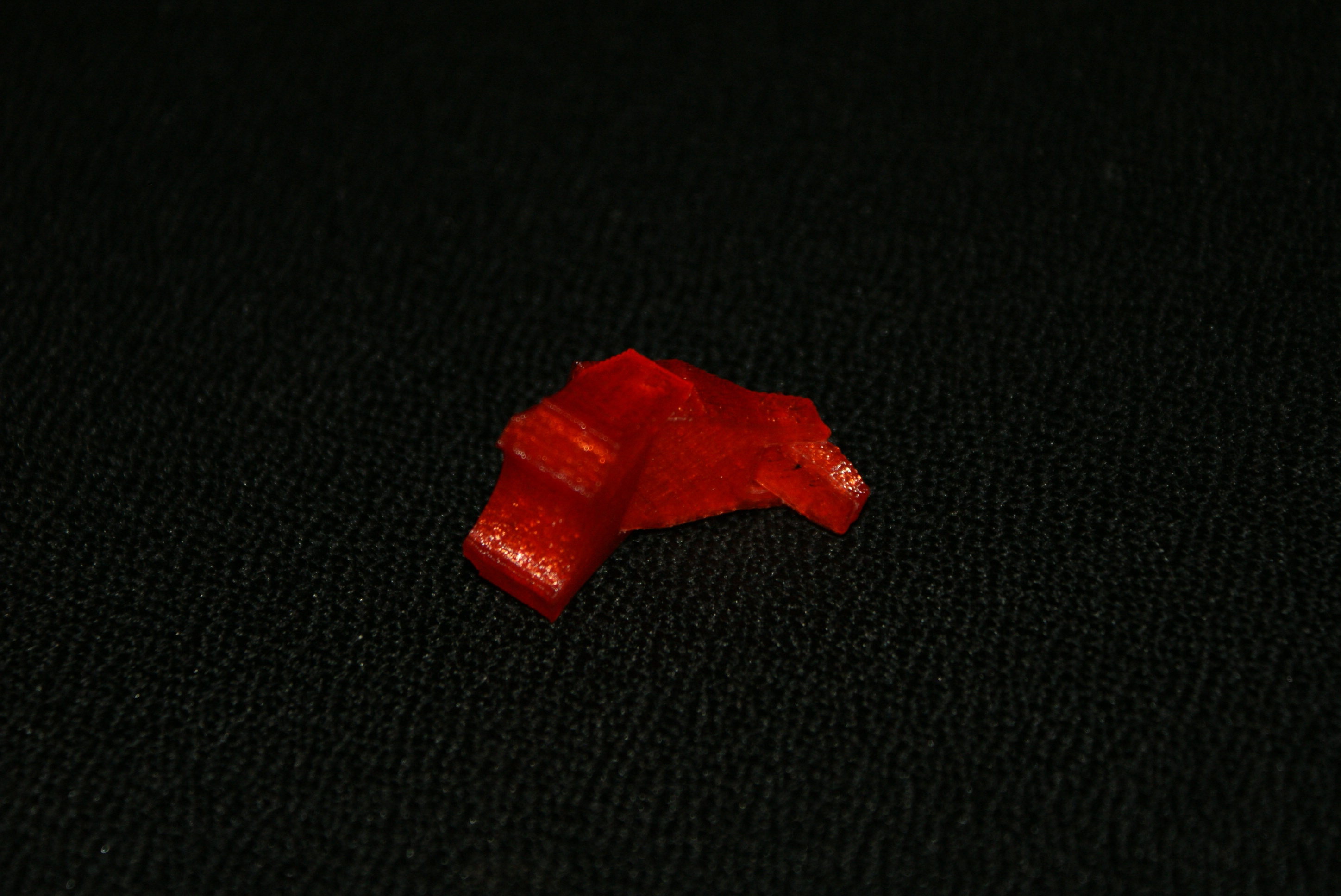
And a little bit more in order to increase the size of the pins so they weren't quite as wobbly, and also add a little more detail:
This was printed out again, and it was a bit tighter.

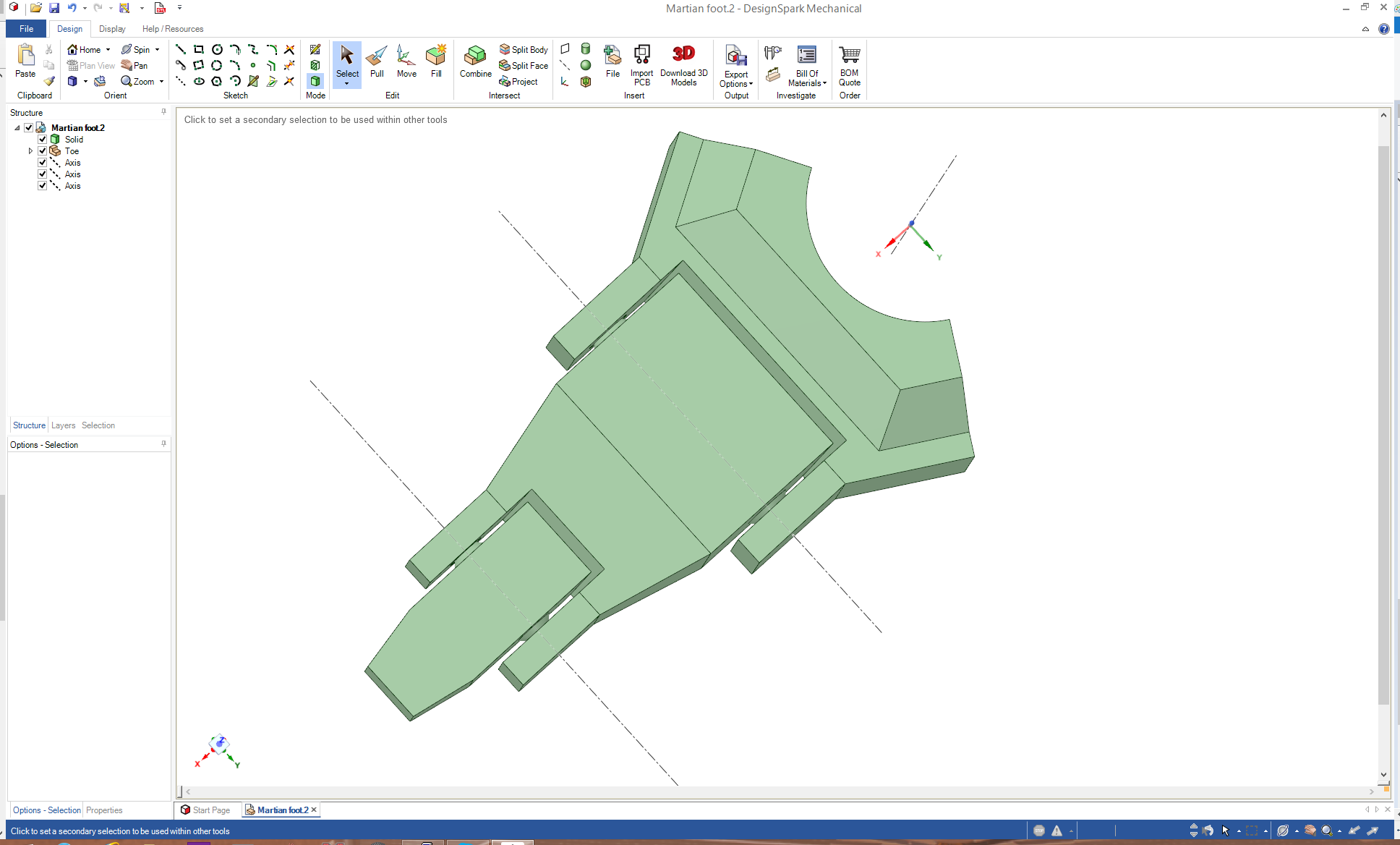
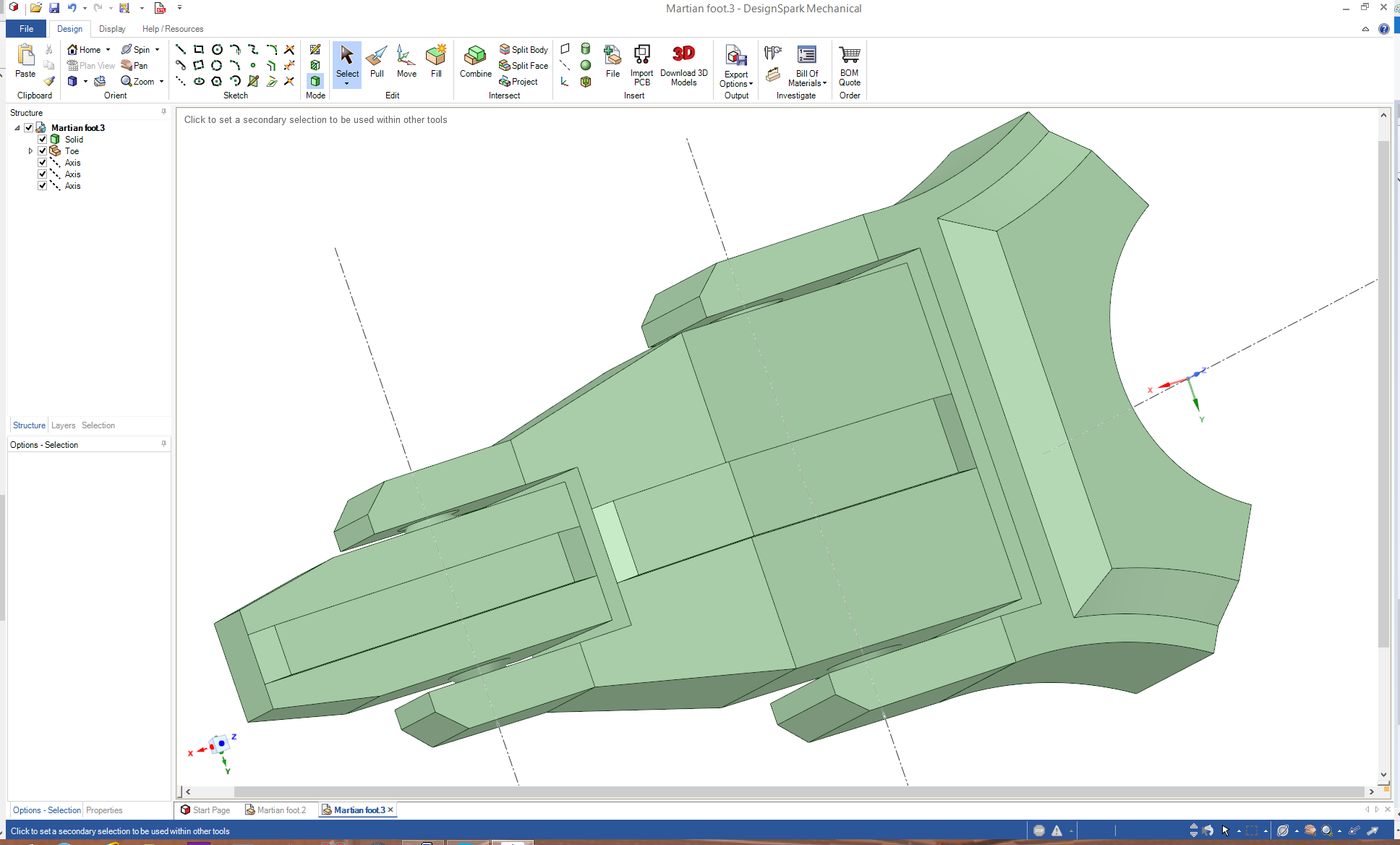
And then I made two more copies (as before), with 120° and 240° rotations:


The hole in the middle is for the ankle hinge mechanism, which I'll make tomorrow
Date last modified:
2019-10-20 15:44:09